(03.2025) I started a new chapter at Apple this month! Excited to be working on haptic devices used by BILLIONS.
(02.2025) I’ve defended my dissertation! Next chapter begins in ~1 month!
(01.2025) My first author paper, Power-on-Touch, has been conditionally accepted to CHI 2025! More info to come!
(10.2024) I demo’d our new paper Augmented Breathing with Jas at UIST 2024 in Pittsburgh. Also got to demo a variety of work at the southside science festival at UChicago!

(04.2024) I demo’d our new CHI paper Stick&Slip at the Haptics Symposium in Long Beach, CA.
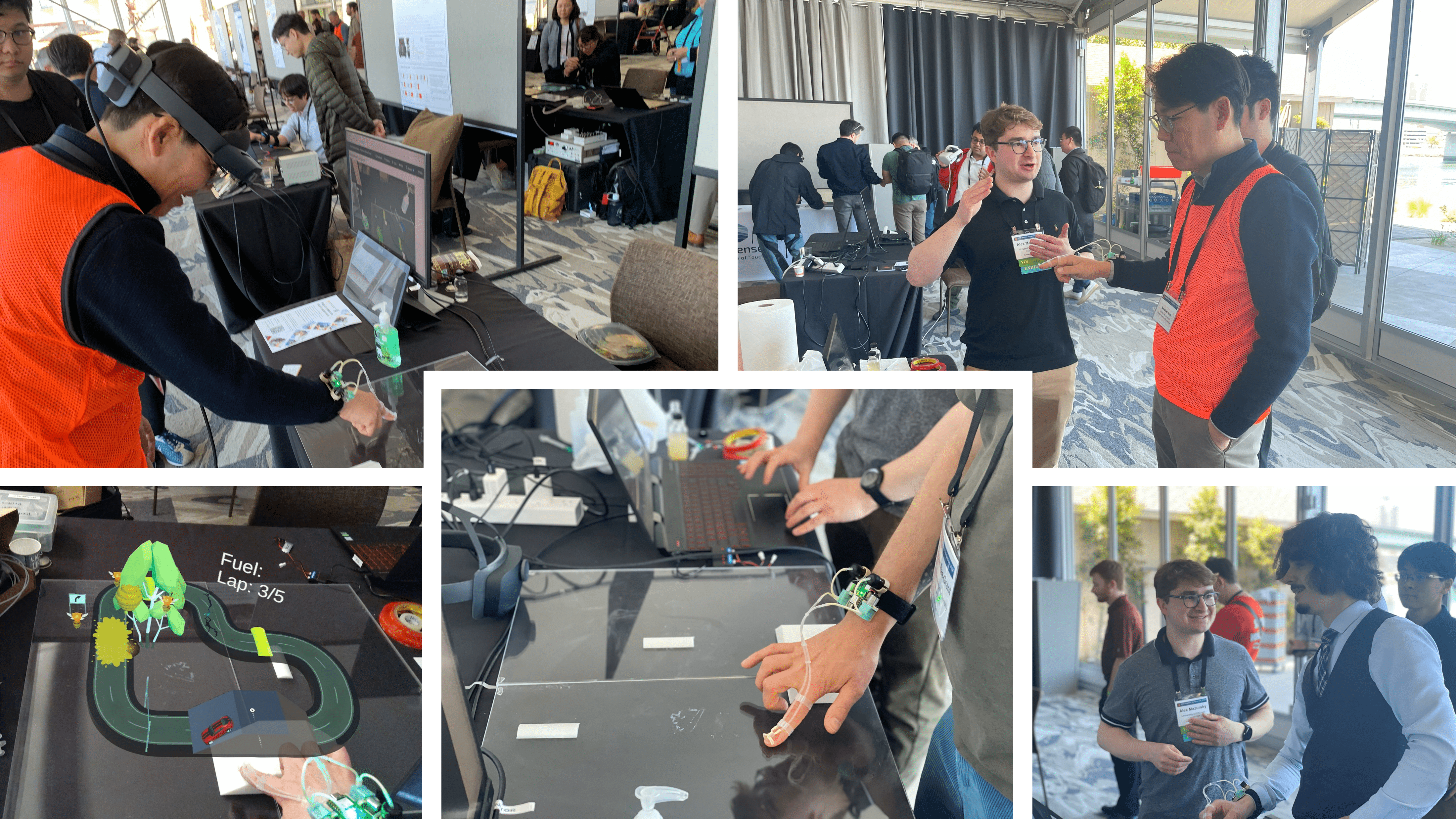
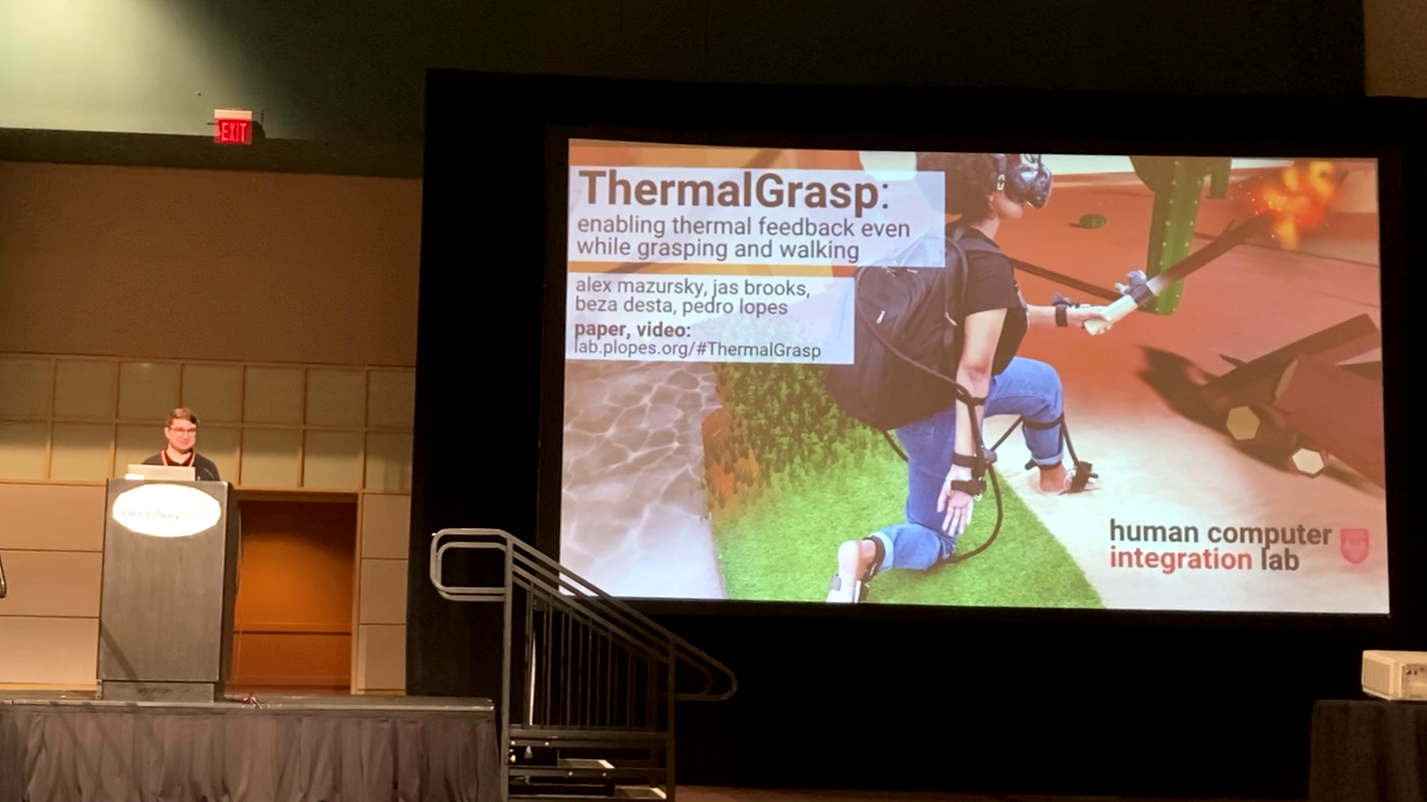
(03.2024) I presented ThermalGrasp at IEEE VR in Orlando, FL.
We also wrapped up teaching engineering class.
(02.2024) I’ll be at a few conferences this spring (CHI, Haptics Symposium, & IEEE VR!) presenting some new haptics work (details coming soon) – let’s connect!
(11.2023) I’m back from an amazing internship at Meta and had a great time attending UIST, where I presented new work: ThermalRouter: Enabling Users to Design Thermally-Sound Devices.
(05.2023) I start an internship with Meta Reality Labs working on haptics research next month (June-Nov)! If you’re in the PNW, let’s connect.
(01.2023) I kicked off the new year by giving a talk at UChicago’s People and Tech Seminar about ongoing work on the future of haptics.
(09.2022) I presented new work at IEEE RO-MAN 2022. Check out our paper: Physical Touch from a Robot Caregiver: Examining Factors that Shape Patient Experience
(05.2022) Excited to be attending the upcoming CHI in person for the first time! Please feel free to reach out and chat if you’re around – can’t wait to meet soon!
Our lab is getting ready!

(04.2022) Celebrating some paper submissions this month, fingers crossed.
(10.2021) Celebrating a paper submission!
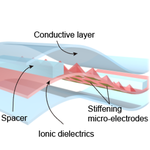
A collaborative project (“A stretchable and strain-unperturbed pressure sensor for motion-interference-free tactile monitoring on skins) led by Sihong Wang’s group was accepted to Science Advances!
UIST was awesome this year – really enjoyed connecting with so many people working on exciting projects. Let’s continue to connect and collaborate!
Received great news that a SEED proposal put together by Pedro and I has been funded by the Chicago Materials Research Center (MRSEC)!
(09.2021) Submitted a paper! Grateful for all the support of my labmates and collaborators in these hectic times. Fingers crossed.
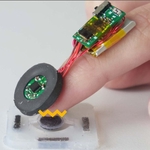
(08.2021) We published an extension of my MS work in Applied Sciences with greater focus on integrating sensing into our ER fluid-based haptic actuator, which was recognized as a Feature Paper by the editor: Design and Experimental Evaluation of an Electrorheological Haptic Module with Embedded Sensing
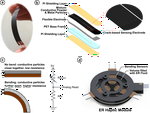
(07.2021) MagnetIO will also be in SIGGRAPH’s Emerging Technologies program next month! Come check it out, along with another awesome work from our group, Touch&Fold!
(05.2021) I’ll be presenting MagnetIO at CHI 2021! Check out the pre-recorded talk here. Grateful to my collaborators for all their help.
(12.2020) I had the first paper of my PhD accepted to CHI 2021! More details to come!
(11.2020) I’m attending the Fall MRS Meeting for the first time!
(10.2020) I really enjoyed attending UIST virtually, was great to see friends!
(09.2020) Made it through the CHI deadline!
(06.2020) First year of PhD courses done! I’m excited to deep dive into research this summer.
(03.2020) In light of COVID-19, I’m doing research and taking classes from home this quarter. Stay well, everyone!
(02.2020) I’m honored to have been named a CDAC Doctoral Fellow. Check out the project I am working on with Pedro Lopes and Sihong Wang: Health Monitoring Based on Wearable Sweat Sensors
(01.2020) My second journal paper is now published in Smart Materials and Structures: A compact and compliant electrorheological actuator for generating a wide range of haptic sensations
(11.2019) I kicked off the HCIntegration Lab’s skillshare series by leading a discussion on mechanics of materials:

(10.2019) I’m an SV at UIST! Let’s talk new interfaces!
(10.2019) My advisor Jeong-Hoi Koo presented our work at ICAST 2019 in Montreal! Read our extended abstract here.
(09.2019) I gave a brief talk on “Creating new interactive devices with smart materials” at our joint lab meeting with Sihong Wang’s group.
(09.2019) I’ve begun my PhD at UChicago! And migrated to a new website design.
(07.2019) I attended Mirela Alistar’s Biochip Summer Workshop at CU Boulder.
(05.2019) I defended my MS thesis at Miami University and graduated!

(03.2019) Talk presented at the OSGC Student Research Symposium.
(03.2019) My first journal paper on our ER fluid-based haptic actuator is now live!