Incorporating Sensing Capability in an Electrorheological Haptic Module
Abstract
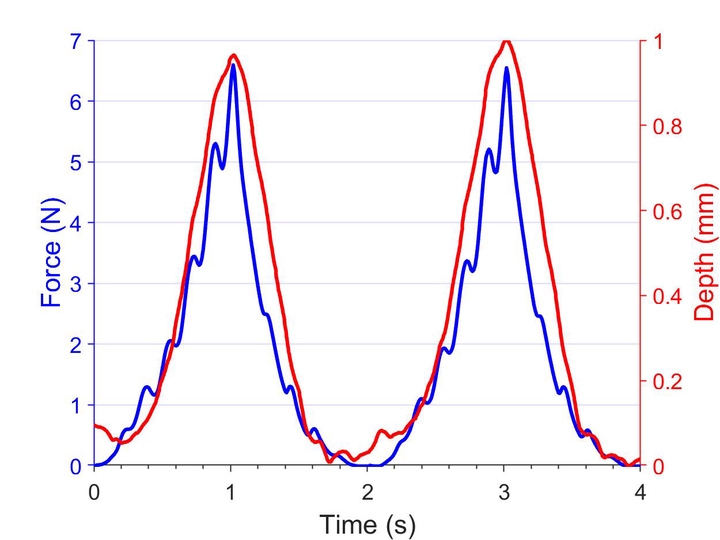
We present embedding a sensing capability to a slim haptic actuator based on electrorheological (ER) fluids, designed for conveying vivid kinesthetic and tactile sensations at small scale. Haptic feedback is produced through electrorheological fluid’s controllable resistive force and varies with the actuator’s deformation. To demonstrate the proposed actuator’s feedback in realistic applications, a method for measuring the actuator’s deformation must be implemented for feedback control. To this end, in this study, we incorporate a sensor design based on stress-sensitive resistive film in bending to the ER haptic actuator. The combined actuator and sensor module was tested for its ability to simultaneously actuate and sense the actuator’s state under indentation. The results show that the deflection sensor can accurately track the actuator’s displacement over its small stroke range. Thus, the proposed sensor may enable control of the output resistive force according to displacement.