Design, modeling, and evaluation of a slim haptic actuator based on electrorheological fluid
Abstract
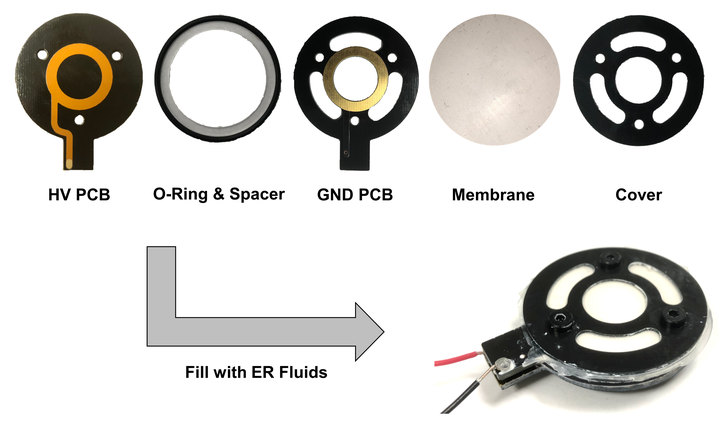
Realistic haptic feedback is needed to provide information to users of numerous technologies, such as virtual reality, mobile devices, and robotics. For a device to convey realistic haptic feedback, two touch sensations must be present: tactile feedback and kinesthetic feedback. Although many devices today convey tactile feedback through vibrations, most neglect to incorporate kinesthetic feedback. To address this issue, this study investigates a haptic device with the aim of conveying both kinesthetic and vibrotactile information to users. A prototype based on electrorheological fluids was designed and fabricated. By controlling the electrorheological fluid flow via applied electric fields, the device can generate a range of haptic sensations. The design centered on an elastic membrane that acts as the actuator’s contact surface. Moreover, the control electronics and structural components were integrated into a compact printed circuit board, resulting in a slim device suitable for mobile applications. The device was tested using a dynamic mechanical analyzer to evaluate its performance. The device design was supported with mathematical modeling and was in agreement with experimental results. According to the just-noticeable difference analysis, this range is sufficient to transmit distinct kinesthetic and vibrotactile sensations to users, indicating that the electrorheological fluid–based actuator is capable of conveying haptic feedback.