Abstract
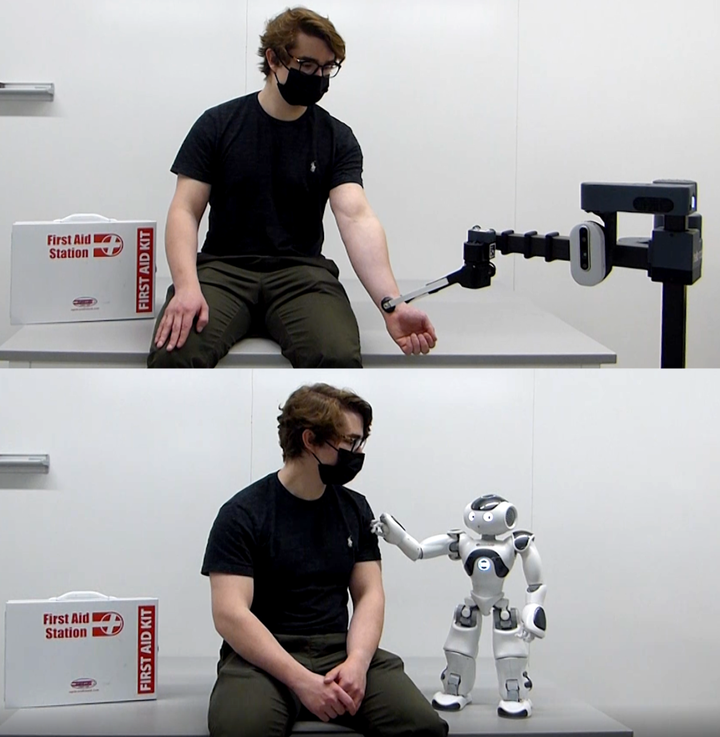
Robot-initiated touch is a promising mode of expression that would allow robot caregivers to perform physical tasks (instrumental touch) and provide comfort (affective touch) in healthcare settings. To understand the factors that shape how people respond to touch from a robotic caregiver, we conducted a crowdsourced study (N=163) examining how robot-initiated touch (present or absent), the robot’s intent (instrumental or affective), robot appearance (Nao or Stretch), and robot tone (empathetic or serious) impact the perceived quality of care. Results show that participants prefer instrumental to affective touch, view the robot as having greater social attributes (higher warmth, higher competence, and lower discomfort) after robot-initiated touch, are more comfortable interacting with the human-like Nao than the more machine-like Stretch, and favor consistent robot tone and appearance. From these results, we derived three design guidelines for caregiving robots in healthcare settings