Application of Electrorheological Fluid for Conveying Realistic Haptic Feedback in Touch Interfaces
Abstract
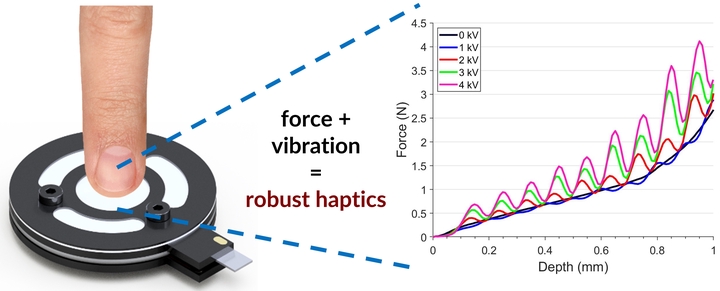
Realistic haptic feedback is necessary to provide meaningful touch information to users of numerous technologies, such as virtual reality, mobile devices and robotics. For a device to convey realistic haptic feedback, two touch sensations must be present: tactile feedback and kinesthetic feedback. Tactile feedback is felt at the surface of one’s skin and displays textures and vibrations, whereas kinesthetic feedback is felt in one’s joints and muscles and transmits position and movement information. While many devices today display tactile feedback through vibrations, most neglect to incorporate kinesthetic feedback due to size constraints. To provide comprehensive feedback, this study investigates a new haptic device based on an unconventional actuation method: electrorheological (ER) fluid, a smart fluid with tunable yield stress under the application of electric field. The device’s control electronics and structural components are integrated into a compact printed circuit board, resulting in a slim device suitable for mobile applications. By controlling the ER fluid flow via applied electric fields, the device can generate a wide and distinct range of both tactile and kinesthetic sensations. These sensations were derived analytically from ER fluid’s governing equations as well as experimentally. The device may be used as a haptic interface between a user and virtual environment.